




source robotics
MSG Gripper
MSG Gripper
Low stock: 2 left
Couldn't load pickup availability
This is a pre-release version of gripper!
If the gripper option or color you need is not available or out of stock, email us, and we will contact you about availability and ETA!
Lead Time (processing before shipping): 3–7 days
MSG compliant AI stepper gripper is a gripper based on StepFOC stepper drivers. It is a gripper capable of controlling its gripping force (We use FOC control on steppers), making it perfect for assembly tasks and human-robot collaboration. Because it is designed to carry a camera on top, providing a full view of the gripping area, it is perfect for AI training applications.
Mechanical files and firmware are open source allowing you to add a custom griping tool and attach it to any robotic arm or robot. Gripper software is also open-source.
* Note that MSG grippers do not ship with gripper jaws as seen on the images. You can 3D print them from this repository or buy them seperately from our store: Link
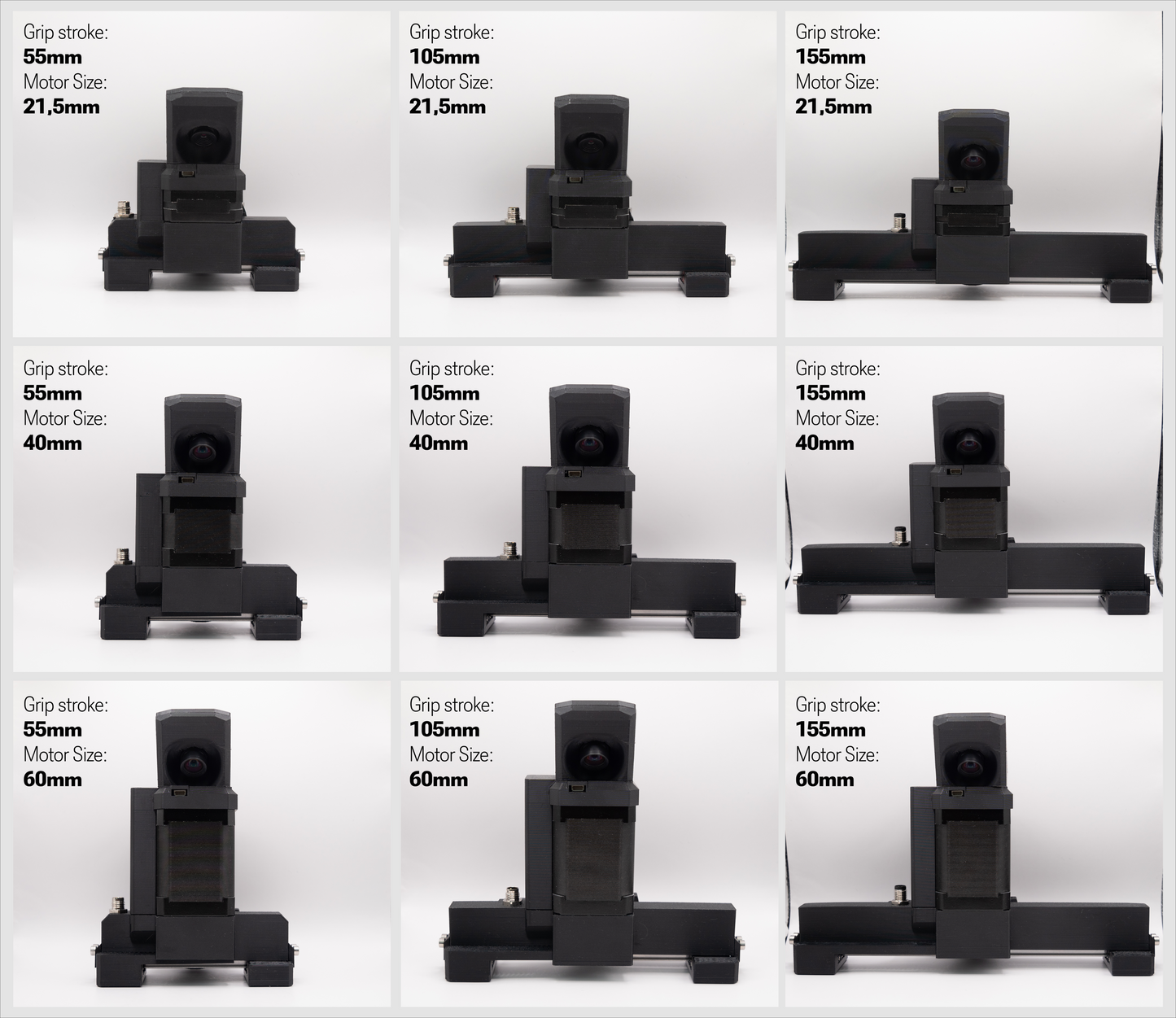
* Images shown here are of versions Grip stroke 105mm + Motor size 40mm. Other options will change the general size/look of the gripper!
MSG gripper is available as a fully assembled gripper or you can build your own by following these instructions!
For PAROL6 you will also need this cable.
More info about shipping, import taxes, and duties.





Gripper features
-
Simple to program
Created to be paired with PAROL6 commander software. Easy to use communication interface via CAN bus or UART.
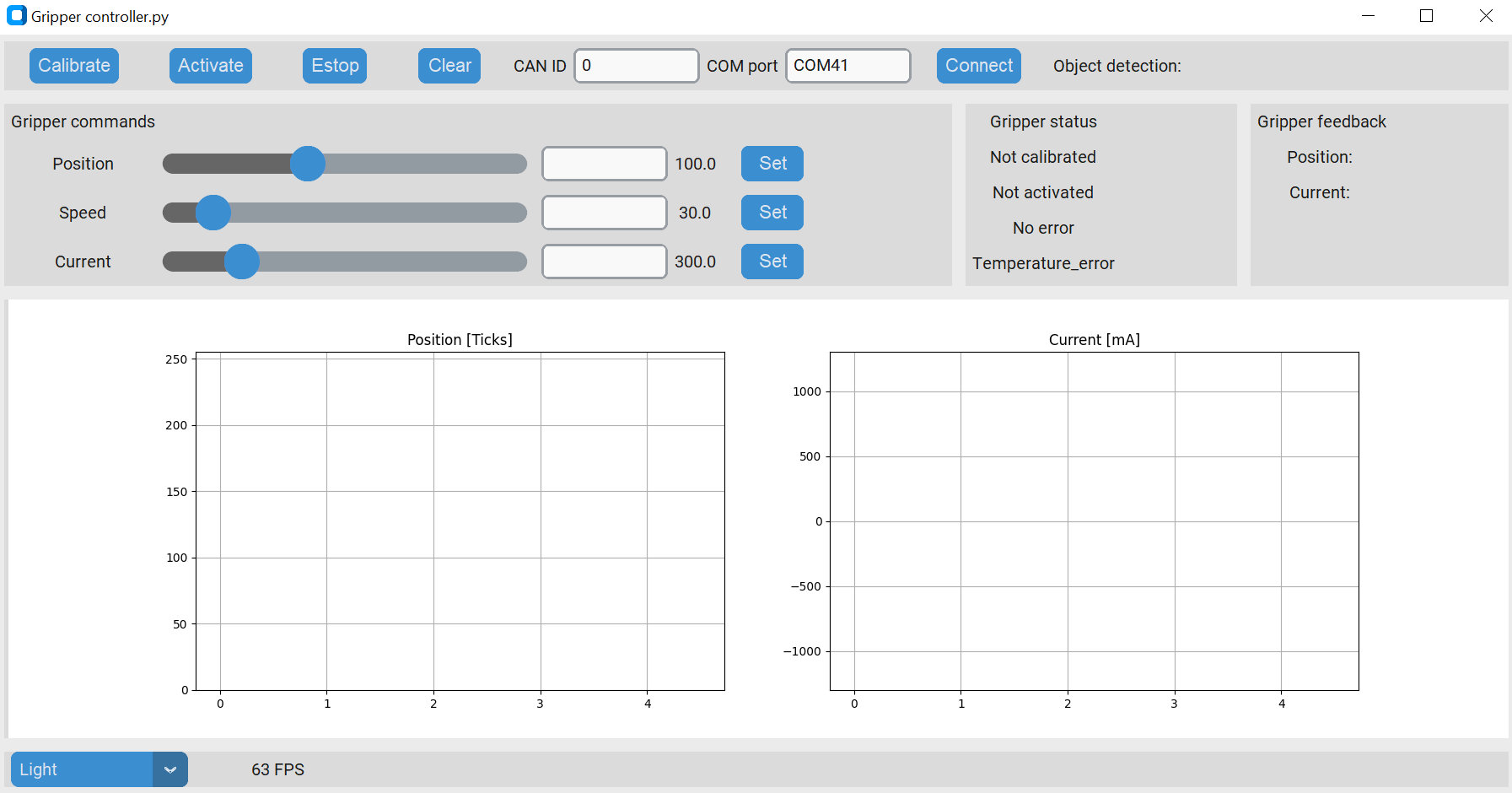
Check our python API for simple examples or control the gripper via GUI! -
Modular design
Open source mechanical design allows you to adapt the gripper to any robot. This gripper is modular in nature in 2 ways:
- Adjust grip length with different linear rails with options of 100mm,150mm and 200mm!
- Adjust grip strength with different stepper sizes, supporting steppers of lenght 21.5mm, 40mm and 60mm!
-
Safe
Uses current sensing to detect contact with the objects. Can control amount of force it applies to the objects!
Grip force can be adjusted allowing you to grasp a wide range of items; from delicate and soft to rigid and sturdy.

Specifications
-
Electrical specs
- Motor: closed loop NEMA17 stepper
- CAN bus protocol: 1 Mbit
- Standby current: 20mA
- Standby power: 0.5W
- Voltage: 12 -24V
-
Gripper specs
- Stroke: variable from 50- 150mm
- Grip force:
- Gripper weight: 320g
- Closing speeds:
- Operating temperature: -10, +70
- Body material: PETG plastic

Open-Source firmware, GUI and API
-
-
- Control and configure your gripper with open source GUI.
- Need to change the firmware of the gripper to fit your needs? It runs on spectral firmware software that is also Open-Source!
- MSG gripper is fully integrated with PAROL6 robotic arm and its control software but you can use easy to use Python API to control your gripper with any robotic arm and system with few lines of code!
