
Companies like Toyota (check the video at the bottom) and Festo are already leveraging soft robotic grippers inspired by the Fin Ray Effect to enhance robotic training systems. These grippers are ideal for such tasks because traditional robot programming leaves no room for error—every robot trajectory is pre-programmed and fixed.
With the adoption of AI and reinforcement learning (RL) in robotics, robots increasingly interact with unstructured environments, objects, and obstacles. This demands grippers that can adapt dynamically. The Fin Ray Effect-based grippers are perfect for this need. Just like human hands, which are soft and conform to the objects they grasp, these grippers provide flexibility and adaptability to handle diverse tasks.
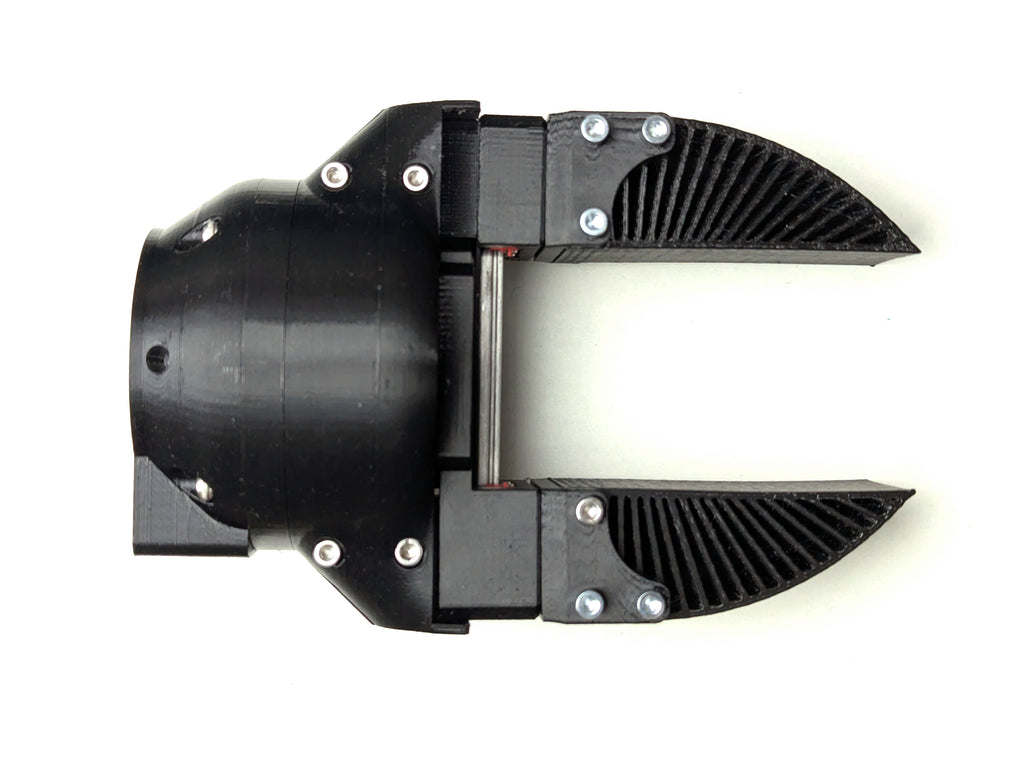
We created Fin Ray add-ons for our compliant and capable SSG48 electric gripper, designed to handle dynamic tasks with precision.
1. What is the Fin Ray Effect?
The Fin Ray Effect is a natural phenomenon observed in fish fins. This principle has been applied to robotic fingers, allowing them to wrap around objects without the need for extensive actuation systems. Such designs are good for delicate tasks like handling fragile items (e.g., eggs, lightbulbs) or unstructured items (e.g., bags, boxes...)

Material and Structural
- 3D Printing: 3D printing made manufacture grippers with flexible materials such as TPU 95A easy . This approach reduced material costs, increased design flexibility, and streamlined prototyping. In the past this could be done with mixing resins and doing molds but nowadays you can make these gripper jaws with 20 dollars worth of TPU
- Hybrid Designs: By integrating TPU with hard reinforcements (e.g., PLA or PETG), these grippers combine flexibility with structural durability. Features such as fingernails for handling thin objects and asymmetrical crossbeams enhance performance. Recently, this has become easier to achieve with AMS 3D printing systems and a wider range of 3D printing materials.
- For better grip it is good to lace the ends of the jaws with soft foam
Performance Improvements
-
Wrapping Capabilities:
Topologically optimized grippers can reduce weight by up to 15% while maintaining strength. - Empirical testing – It is much faster and easier than topology optimization due to the speed and simplicity of 3D printing. Additionally, because of the non homogeneous nature of 3D-printed parts, it is often more effective to test designs directly rather than rely solely on simulations.

Testing and Applications
- Due to their flexibility, these grippers can become deformed even in their neutral state. This poses challenges for tasks that require a firm and stable grip. For example, when stacking two Lego bricks on top of each other, they tend to fail. Similarly, they struggle to grab very small or thin objects, such as needles or paper. Their flexibility often leads to deformation during grabs, preventing them from maintaining their original shape, which is crucial for precise handling.
You can buy SSG48 gripper here: https://source-robotics.com/products/compliant-gripper
OR
Build your own: https://github.com/PCrnjak/SSG-48-adaptive-electric-gripper
Additional reading resources:
Teaching Robots New Behaviors
Papers:
https://link.springer.com/article/10.1007/s40430-024-04957-0
https://www.frontiersin.org/journals/robotics-and-ai/articles/10.3389/frobt.2016.00070/full